

Датчики частоты вращения двигателя используются в системах управления двигателем для
- измерения числа оборотов двигателя и
- определения положения коленчатого вала (положение поршня двигателя).Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
Конструкция и принцип действия
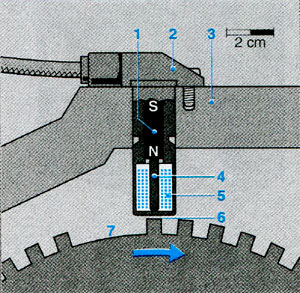
Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (рис. 1, поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнито мягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита.
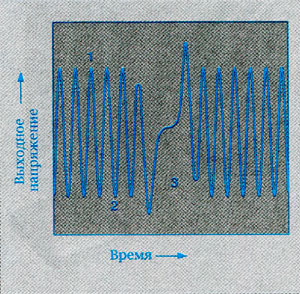
Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя (рис. 2). Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ... > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
| рисунок №1 Индуктивный датчик скорости вращения (конструкция) | |
|---|---|
 |
|
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
| рисунок №2 Сигнал индуктивного датчика скорости вращения двигателя | |
|---|---|
 |
|
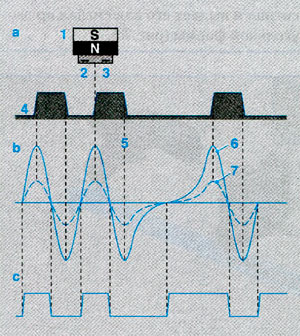
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (рис. 3, поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR -датчики
Электрическое сопротивление магниторезистивного материала (АМР, анизотропный магниторезистивный) является анизотропным.
| рисунок №3 Принцип работы дифференциального датчика Холла | |
|---|---|
 |
|
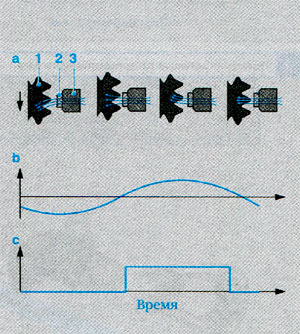
Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в АМР -датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо (рис. 4). В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR -датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками АМР здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР -датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
| Принцип определения числа оборотов с помощью датчика АМР | |
|---|---|
 |
|