

Датчики частоты вращения колеса
Применение
Датчики частоты вращения колеса служат для определения скорости вращения колес автомобиля (числа оборотов колеса). Сигналы частоты вращения передаются по кабелю в блок управления ABS, ASR или ESP автомобиля, который индивидуально управляет силой торможения каждого колеса. Этот контур регулирования предотвращает блокирование (при наличии ABS) или прокручивание колес (при наличии ASR или ESP) и гарантирует устойчивость и управляемость автомобиля. Системы навигации также нуждаются в сигналах частоты вращения колеса, чтобы рассчитывать пройденный путь (например, в туннелях или при отсутствии сигналов спутника).
Конструкция и принцип действия
Сигналы для датчика частоты вращения колеса формируются с помощью стального импульсного датчика, жестко соединенного со ступицей колеса (для пассивных датчиков), или мультиполюсного магнитно-импульсного датчика (для активных датчиков). Этот импульсный датчик имеет такую же скорость вращения, что и колесо, и проходит бесконтактно чувствительную зону головки датчика. Датчик «считывает» без прямого контакта через воздушный зазор величиной до 2 мм (рис. 2).
Воздушный зазор (с небольшими допусками) служит для того, чтобы обеспечить процесс получения сигнала без помех. Возможные помехи, такие как колебания, вибрации, температура, влажность, условия установки на колесе и пр. исключаются.
| Рисунок № 1 Пассивные (индуктивные) датчики частоты вращения | |
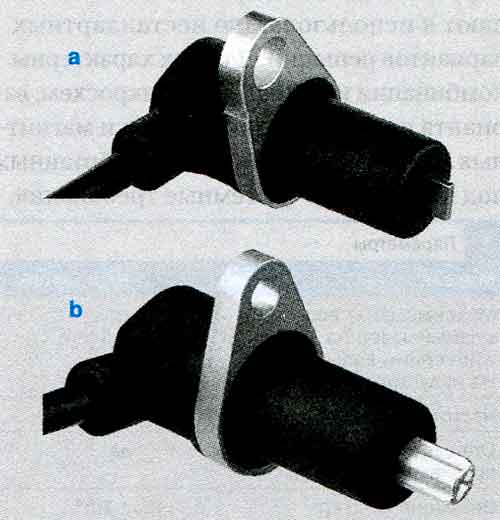 |
а Резцовый контактный штифт (плоский индуктор) b Ромбовидный контактный штифт (крестовидный индуктор) |
С 1998 г. вместо пассивных (индуктивных) датчиков частоты вращения в новейших разработках используются практически исключительно активные датчики частоты вращения колеса. Пассивные (индуктивные) датчики частоты вращения состоят из постоянного магнита (рис. 2, поз. 1) и соединенного с ним магнитомягкого полюсного контактного штифта (3), который вставлен в катушку (2). Таким образом, создается постоянное магнитное поле.
Полюсный контактный штифт находится прямо над импульсным колесом (4), зубчатым колесом, жестко соединенным со ступицей. Во время вращения импульсного колеса существующее постоянное магнитное поле «нарушается» из-за постоянной смены зубца и впадины. За счет этого изменяется магнитный поток, проходящий через полюсный контактный штифт, а вместе с ним и магнитный поток, проходящий через витки катушки. Смена магнитных полей индуцирует в обмотке переменное напряжение, которое снимается на концах обмотки.
Как частота, так и амплитуда переменного напряжения пропорциональны числу оборотов колеса (скорости вращения) (рис. 3). Когда колесо не движется, индуцируемое напряжение также равно нулю.
Форма зубцов, воздушный зазор, крутизна скачка напряжения и входная чувствительность прибора управления определяют минимальную измеряемую скорость автомобиля, а также минимально возможную для использования ABS чувствительность срабатывания и скорость переключения.
| Рисунок № 2 Чертеж принципа действия пасивного датчика скорости вращения | |
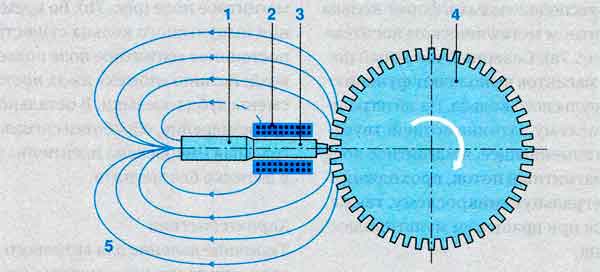 |
1 Постоянный магнит |
Поскольку условия монтажа на колесе не везде одинаковые, существуют различные формы полюсных контактных штифтов и различные варианты монтажа. Наиболее распространены резцовый полюсный контактный штифт (рис. 1а, также называемый плоским индуктором) и ромбовидный контактный штифт (рис. lb, также называемый крестовидным индуктором). Оба полюсных контактных штифта при монтаже должны быть точно направлены к импульсному кольцу.
| Рисунок № 3 Выходное напряжение сигнала пассивного датчика скорости вращения | |
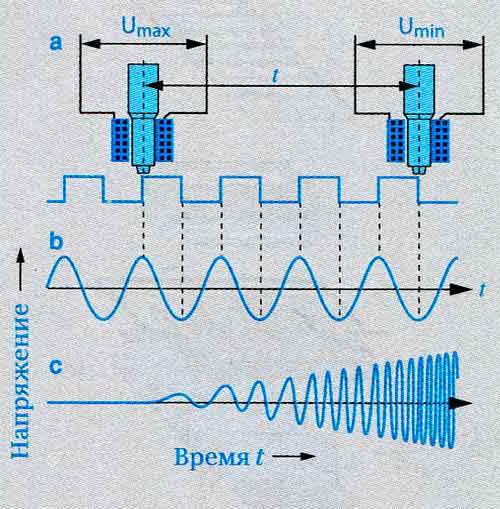 |
а Пассивный датчик скорости вращения с импульсным кольцом b Сигнал датчика при постоянной скорости вращения колеса с Сигнал датчика при возрастающей скорости вращения колеса |
Активный датчик скорости вращения
Сенсорные элементы
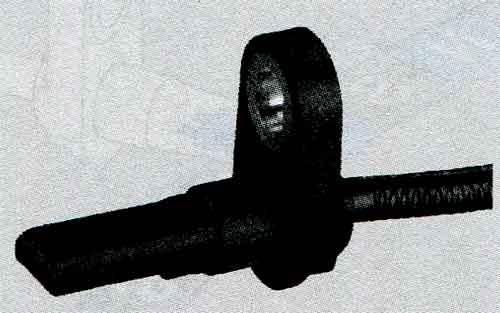
В современных тормозных системах используются практически исключительно активные датчики скорости вращения (рис. 4). Обычно они состоят из герметично залитой пластиком кремниевой интегральной микросхемы, распложенной в головке датчика.
Наряду с магниторезистивными интегральными микросхемами (изменение электрического сопротивления при изменении магнитного поля) фирма «Bosch» все еще использует в больших объемах сенсорные элементы Холла, которые реагируют на малейшие изменения магнитного поля и поэтому могут использоваться при воздушных зазорах большего размера по сравнению с пассивными датчиками скорости вращения.
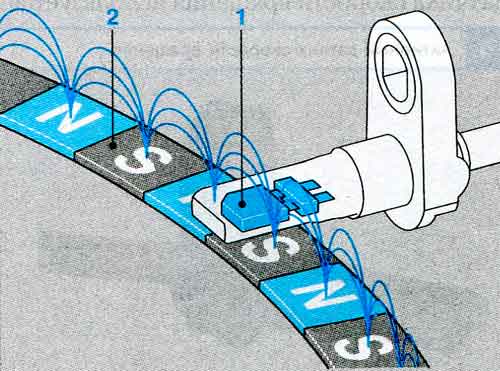
Активное (импульсное) кольцо
В качестве импульсного кольца активного датчика скорости вращения используется мультиполюснное колесо. Речь идет о поочередно расположенных постоянных магнитах, расположенных в форме кольца на немагнитном металлическом носителе (рис. 6 и рис. 7а). Северный и южный полюса этих магнитов выполняют функцию зубцов импульсного кольца. На интегральную микросхему датчика воздействует постоянно изменяющееся магнитное поле. Поэтому магнитный поток, проходящий через интегральную микросхему, также изменяется при вращении мультиполюсного кольца.
| Рисунок № 4 Активный датчик скорости вращения | |
 |
В качестве альтернативы мультиполюсному кольцу можно использовать стальное зубчатое колесо. В этом случае на интегральную микросхему Холла устанавливается магнит, вырабатывающий постоянное магнитное поле (рис. 7b). Во время вращения импульсного кольца существующее постоянное магнитное поле подвергается воздействию «помех» из-за постоянной смены зубца-выемки. В остальном принцип измерения, обработки сигнала и интегральная микросхема идентичны таковым в датчике без магнита.
| Рисунок № 5 Экспозиционный чертеж с мультиполюсным импульсным датчиком | |
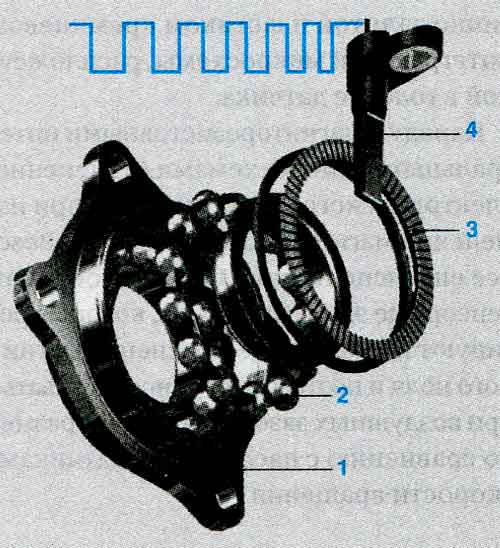 |
1 Ступица колеса |
Характеристики
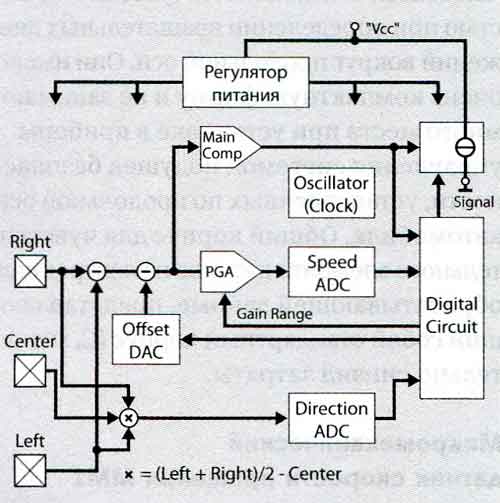
Типичное явление для активного датчика скорости вращения — интеграция измерительного элемента Холла, усилителя сигнала и подготовки сигнала в интегральной микросхеме (рис. 8). Данные о скорости вращения передаются в виде подводимого тока в форме прямоугольных импульсов (рис. 9). Частота импульсов тока пропорциональна числу оборотов колеса, а считывание показаний возможно почти до остановки колеса (0,1 км/ч).
| Рисунок № 6 тивный датчик скорости вращения в разрезе | |
 |
1 Сенсорный элемент |
| Рисунок № 7 Чертеж принципа работы при определении скорости вращения | |
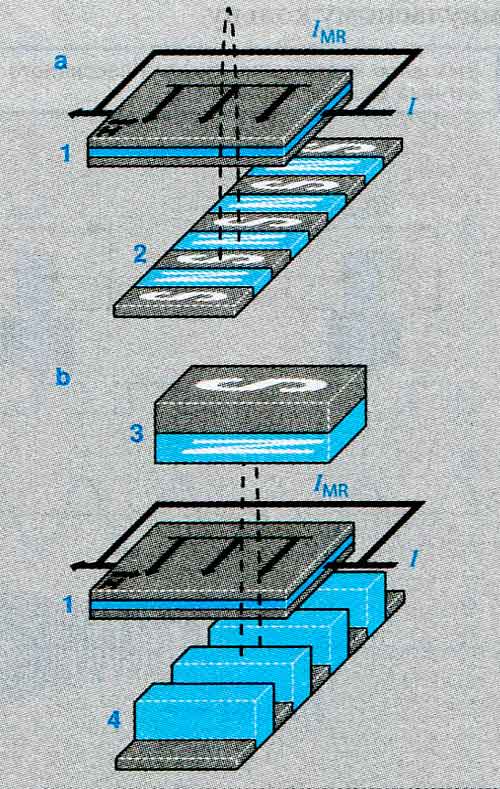 |
а Интегральная микросхема Холлас мультиполюсным импульсным датчиком b Интегральная микросхема Холла со стальным
1 Сенсорный элемент |
Питающее напряжение находится в диапазоне между 4,5 и 20 Вольт. Уровень прямоугольного выходного сигнала составляет 7 мА (низкий) и 14 мА (высокий). При такой форме передачи цифровых сигналов, например, индуктивное напряжение помех является неэффективным по сравнению с пассивным индуктивным датчиком. Связь с блоком управления осуществляется двухпроводным кабелем.
| Рисунок № 8 Блок-схема интегральной микросхемы Холла |
 |
Компактная конструкция и небольшой вес позволяют монтировать активный датчик скорости вращения на подшипнике колеса или в нем (рис. 10). Для этого подходят различные стандартные формы головки датчика.
| Рисунок № 9 Преобразование сигнала в интегральной микросхеме Холла | |
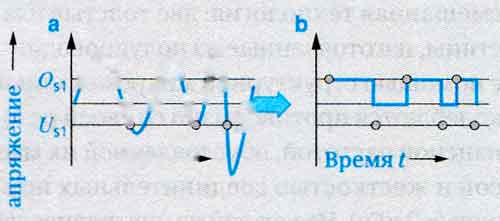 |
а Исходный сигнал b Выходной сигнал 0S1 Верхний порог переключения US1Нижний порог переключения |
| Рисунок № 10 Подшипник колеса с датчиков скорости вращения | |
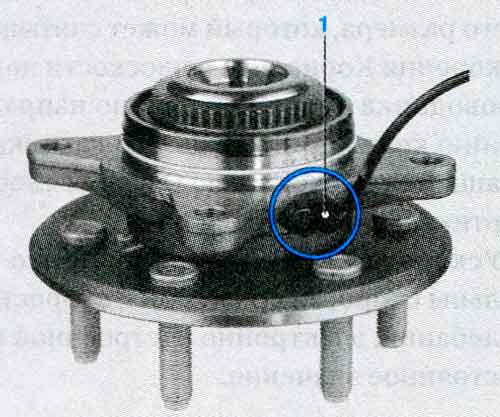 |
1 Датчик скорости вращения |
Цифровая обработка сигнала позволяет передавать кодированную дополнительную информацию с помощью широтноимпульсно-модулируемого выходного сигнала (рис. 11).
Определение направления вращения колес: это особенно необходимо для функции «Hill Hold Control», предотвращающей откат автомобиля назад во время подъема на гору. Определение направления вращения также используется для навигации автомобиля.
Определение состояния остановки: эти данные также обрабатываются в функции «Hill Hold Control». Дальнейшая обработка данных входит в раздел самодиагностики.
Качество сигнала датчика: можно передавать данные о качестве сигнала датчика. Посредством этого водитель в случае ошибки может получить информацию о необходимости своевременно обратиться в сервисную службу.
|
Рисунок № 11 Кодированная передача данных с помощью широтно-импульсно-модулируемых сигналов |
|
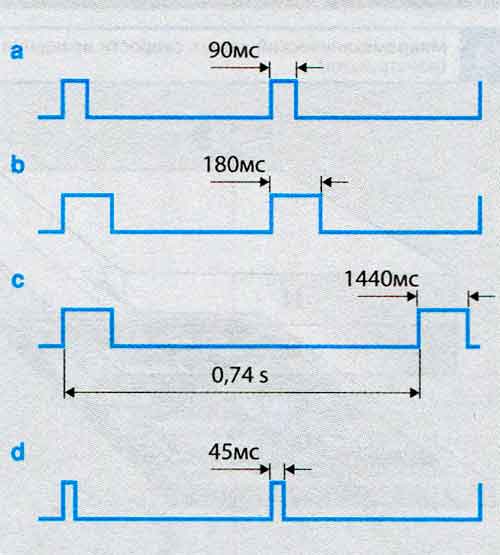 |
а Сигнал скорости при движении назад |