

Применение
В малолитражных, компактных автомобилях все чаще стали применять электромеханические усилители рулевых механизмов. Их основными преимуществами являются простота установки и использования, сокращение энергозатрат и повышению комфорта и безопасности.
Конструкция и принцип действия
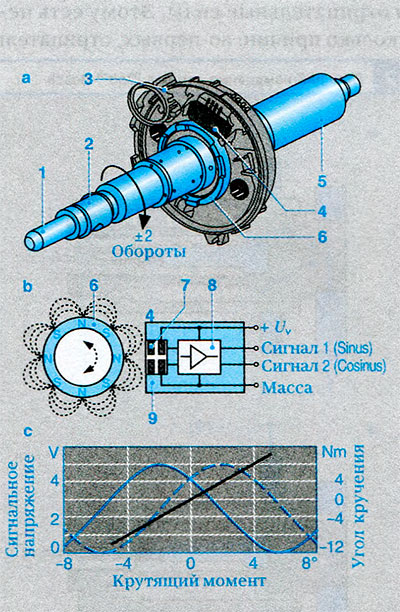
Для определения намерения водителя электромеханический рулевой механизм должен обладать способностью измерять крутящий момент, заданный водителем. В современных серийных датчиках, предназначенных для этих целей, в вале сошки рулевого управления установлен торсион, который в момент поворота рулевого колеса закручивается (рис. 1). Кручение можно измерить с помощью соответствующих инструментов и преобразовать его в электрические сигналы. Необходимый диапазон измерений датчика крутящего момента, использующегося в электромеханических рулевых механизмах, составляет обычно примерно от ± 8 до ± 10 Нм. В целях защиты сплошного торсиона от перегрузки или разрушения максимальный угол кручения вокруг элемента сцепления ограничивается механически.
Чтобы иметь возможность измерить кручение и возникающий в результате него крутящий момент, с одной стороны торсиона устанавливают магниторезистивный датчик, который считывает поле магнитного мультиполюсного колеса, закрепленного с другой стороны. Количество полюсов этого колеса выбрано таким образом, чтобы датчик в пределах своего максимального диапазона измерений отправлял однозначный сигнал, но, вместе с тем, в любое время существовала возможность получения однозначного показания по прилагаемому крутящему моменту.
| Рисунок № 1 Датчик крутящего момента | |
 |
|
Используемый магниторезистивный датчик подает два сигнала в диапазоне измерений, которые отображаются с помощью угла кручения торсиона в виде сигналов синуса и косинуса. Расчет угла кручения и соответственно крутящего момента осуществляется в блоке управления с помощью функции арктангенса.
Поскольку посредством обозначенного измерительного диапазона всегда обеспечивается строгое согласование обоих сигналов, при наличии отклонений от этого согласования распознаются неполадки в работе датчика и принимаются необходимые меры по его замене.
Для обеспечения электрического контакта датчика через диапазон кручения в размере ± 2 оборота рулевого колеса используются угловые пружины с необходимым количеством контактов. С помощью угловых пружин осуществляется подача напряжения питания и передача параметров измерений.